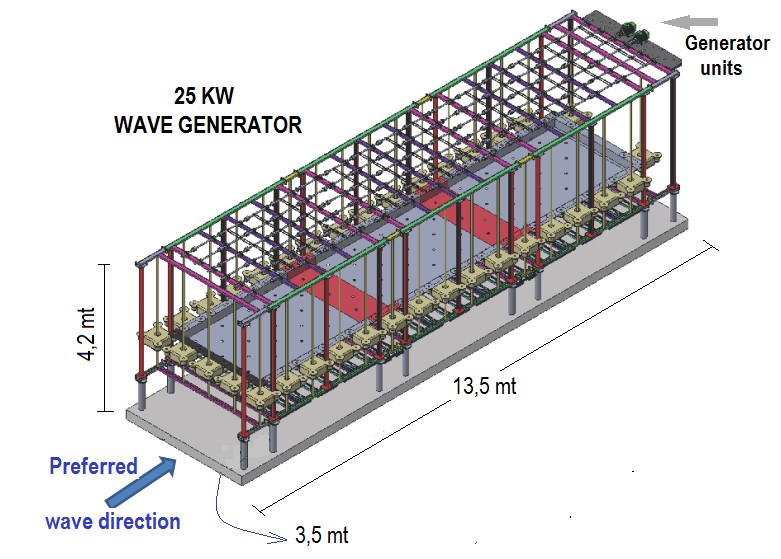
25 KW Waveform generator design
In this first wave generator application, the main carrier-foundation structure is preferred. The aim was to make the interventions on the system easier and to make better observations. In our next application (as described below) the lattice system will be freed and the machine is lowered into the sea and there is no structure on the sea level. Thus, the system has a very aesthetic structure, has been freed from the visual pollution and at the same time, it has become compatible with the open sea application.

25 KW Waveform generator field installation
System installed capacity (7 – 8 kw / mt): 25 KW
System production capacity (with 40% efficiency): 10 KWH
Year average productions (with 70% utilization rate): 85 MWH
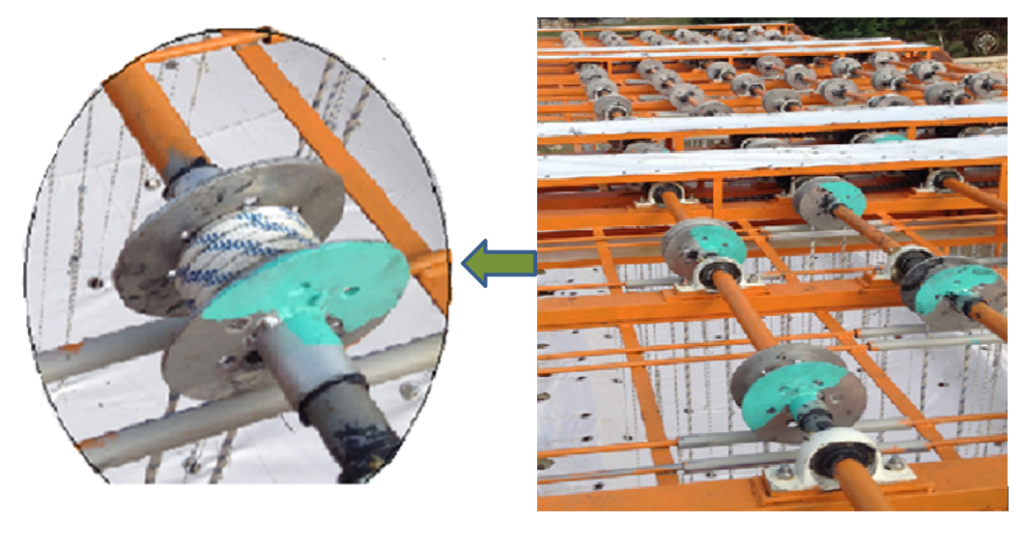
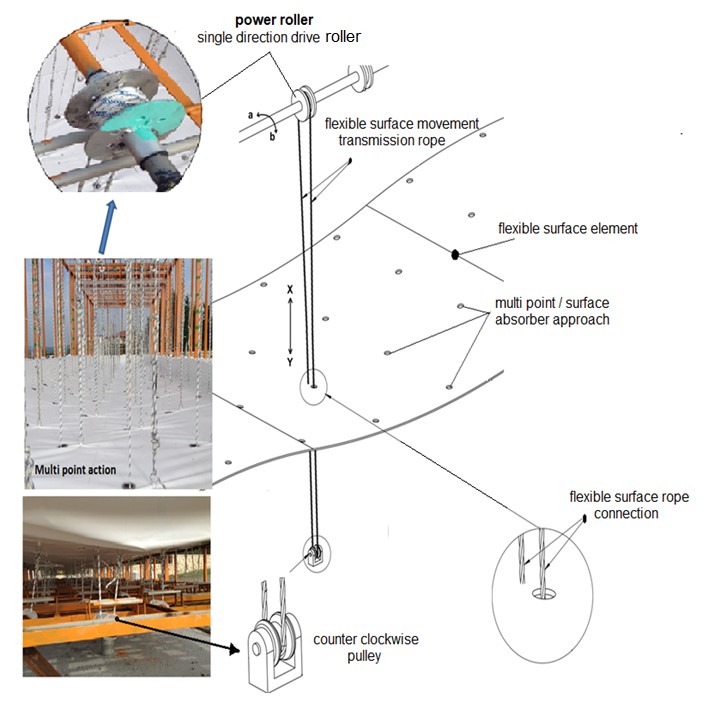
In the figure, the unidirectional pulleys are shown which are driven by the ropes connected to the flexible surface. By pulling the drive point from many nudes on the flexible surface, by connecting the ropes to these drive points (there are 86 drive points in our system), most of the movements with the wave effect on the flexible surface are transferred directly to the unidirectional pulley and hence to the power shaft through these ropes. The unidirectional rollers enable the flexible surface to rotate in an active manner to produce the shaft in the upward motion with the effect of the wave, and in the downward direction of the flexible surface, it becomes ready for the next movement by turning in the opposite direction with the flexible surface without creating resistance.

25 KW Waveform generator field application
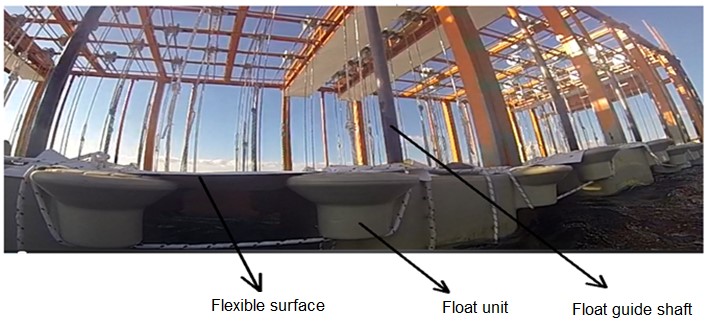
Flexible – Flexible surface edges are connected to the buoys from the top as seen in the application, so that the incoming waves can be directed under the flexible surface. The buoys move on their own guide shafts with an up-down wave effect while keeping the flexible surface edges attached to them constantly above sea level and allowing the waves to go under the continuous flexible surface.
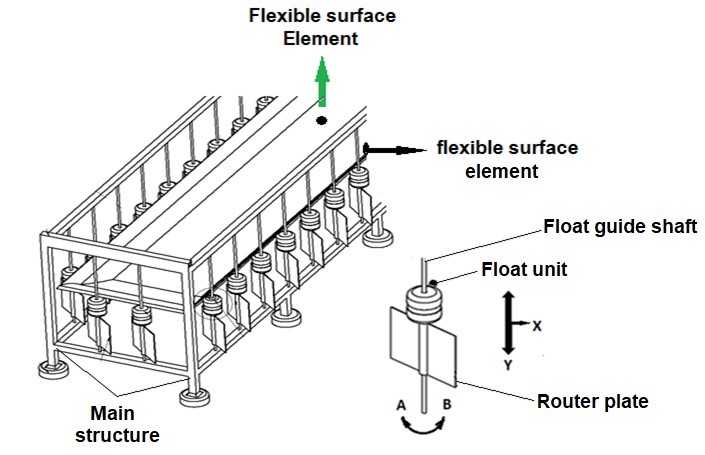
Flexible surface element / Flexible surface:
The edges of the flexible surface that will work by reflecting the wave movements are connected to the buoys. Thus, the buoys moving up and down along the y-axis with the effect of the wave, allow the incoming waves to enter under the flexible surface by keeping the flexible surface edges slightly above the sea surface. The direction of the arrival of the waves is not important;
Router:
The float is below the float that moves with the up-down wave effect on the guide shaft. According to the direction of the wave, A-B rotates around its axis and forms a channel under the flexible surface and allows the wave to move under the flexible surface as much as possible.
The flexible surface edges are held up by the floats at some level above sea level so that the incoming waves can be directed to the bottom of the flexible surface. The waves that are directed under the flexible surface are prevented as much as possible by avoiding the waves out of the system due to the fact that the direction of the wave coming to the system is not important, and the routers are rotating with the effect of the wave in their axis.
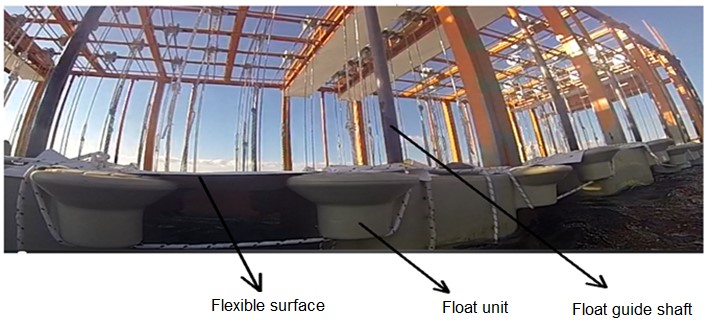
• The flexible surface element placed on the sea surface is attached to the buoys by its edges. The edges of the flexible surface element are kept slightly above sea level by means of floats. The upward and downward movements of the buoys by moving the upward and downward movement of the flexible surface element edges with its own movement, ensure that these flexible surface edges are constantly above the sea surface, which is the same as the direction of the waveguides.
• The flexible kinetic energy under the flexible surface is transferred directly to the power shaft by means of ropes connected to the flexible surface. it provides a more controlled power transmission by spreading the effects it creates on the flexible surface to a certain time.
• As can be seen from the figure above, the rope connected from the bottom to the flexible surface is guided from the reverse direction pulley and through the perforated portion on the flexible surface to the unidirectional drive roller and then to the flexible surface again from the top. The rope continues its movement in the direction of the y-axis in a closed loop frame in the direction of the y-axis, depending on the flexible surface
• The flexible surface moving upward in the y-axis with the effect of the wave, pulling the rope connected to it downwards in the direction of the y-axis with the effect of the reverse direction roller It rotates in the direction of a and starts the production of energy.
• In the period of the impact of the wave and the falling down of the flexible surface (the flexible surface falls down on the y-axis, the rope attached to it will rise upwards on the y-axis with the effect of the reverse direction roller and the unidirectional pulley of the power shaft turns idle in the direction of b, without any resistance to the power shaft. The flexible surface will move to a new position for a new effect with the return of the reverse direction pulley without any resistance in the direction of B.
• The number of power shafts with flexible surface movements in the system which translated by the transmitting ropes can be more than one (we have six units in our field prototype study.
• We have created a structure that will rotate all shafts with each movement on the flexible surface by making chain-threaded connections with each other in our system, the smallest movements on the flexible surface. we have created a structure that can even gather in a single power shaft. If we want a single alternator, we can provide multiple alternator designs which can be activated gradually.